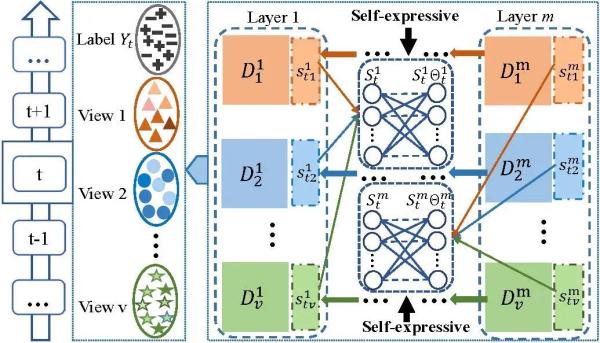
科学家提出连续多视角任务学习让机器人“更快”认知不同世界 为解决现存大部分的多视角任务学习模型不能快速学习新任务的问题,中国科学院沈阳自动化研究所机器人学研究室科研团队提出了一种连续多视角任务学习算法,可使机器人“更快”地认知世界。 生活百科# 多视角学习# 机器人# 深度学习 7个月前970