
摘要
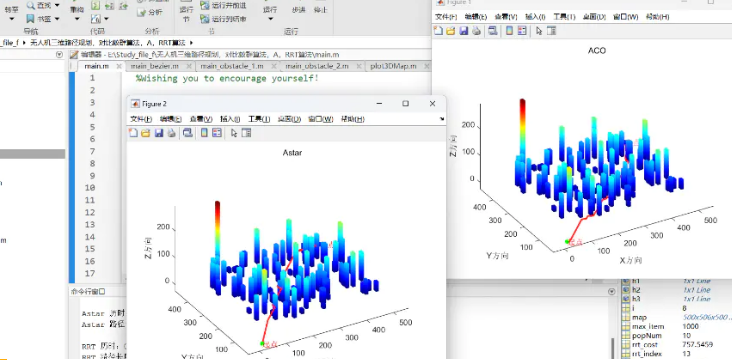
本研究探讨了无人机在三维环境中的路径规划问题,并对比分析了三种不同的路径规划算法:蚁群优化算法(Ant , ACO)、A* 算法和快速扩展随机树(- Tree, RRT)。通过 进行仿真实验,评估各算法在路径优化、计算效率和避障能力方面的性能。结果表明,A* 算法计算速度快但路径可优化性有限,ACO 算法能够找到全局最优路径但计算复杂度较高,而 RRT 适用于动态环境但路径平滑性较差。
理论
1. 蚁群优化算法(ACO)
2. A*算法
3. 快速扩展随机树(RRT)
实验结果
1. 仿真环境
2. 算法对比
3. 实验结论
部分代码
clc; clear; close all;
% 生成3D障碍物环境
[X, Y, Z] = meshgrid(1:5:500, 1:5:500, 1:5:200);
obstacle = rand(size(X)) > 0.8;
% A*路径规划
start = [10, 10, 10];
goal = [400, 400, 100];
path_Astar = Astar3D(start, goal, obstacle);
% ACO路径规划
path_ACO = ACO3D(start, goal, obstacle);
% RRT路径规划
path_RRT = RRT3D(start, goal, obstacle);
% 绘制路径
figure;
subplot(1,3,1); plot3(path_Astar(:,1), path_Astar(:,2), path_Astar(:,3), 'r', 'LineWidth', 2); title('A*');
subplot(1,3,2); plot3(path_ACO(:,1), path_ACO(:,2), path_ACO(:,3), 'g', 'LineWidth', 2); title('ACO');
subplot(1,3,3); plot3(path_RRT(:,1), path_RRT(:,2), path_RRT(:,3), 'b', 'LineWidth', 2); title('RRT');
涉及技术
, M., & , L. M. (1997). Ant for the . .
Hart, P. E., , N. J., & , B. (1968). A basis for the of cost paths. IEEE on and .
, S. M. (1998). – trees: A new tool for path . , Iowa State .
(文章内容仅供参考,具体效果以图片为准)
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章



暂无评论...